5. 插件
本章节主要介绍各个插件的功能及具体操作过程。
5.1. bin picking
bin picking插件模块实现了自动抓取物体的功能。点击菜单栏插件-bin picking,主场景分为三维场景和二维显示场景并弹出bin picking弹窗。其中三维场景中显示机器人运动过程,二维显示场景中显示工件的RGB图像和识别出工件的bounding box。
5.1.1. 创建bin picking工程
点击菜单栏-文件,选择文件类型为bin picking,点击“新建”或者打开bin picking工程文件;之后导入需要的工具工件。
图5-1 新建binpick工程文件
5.1.2. UI界面介绍
导入bin picking工程,点击菜单栏插件-bin picking,弹出bin picking弹窗,如图5-2所示。bin picking弹窗分为四个部分:抓取姿态采样、位置绑定、抓取位置误差补偿及程序运行四个部分。
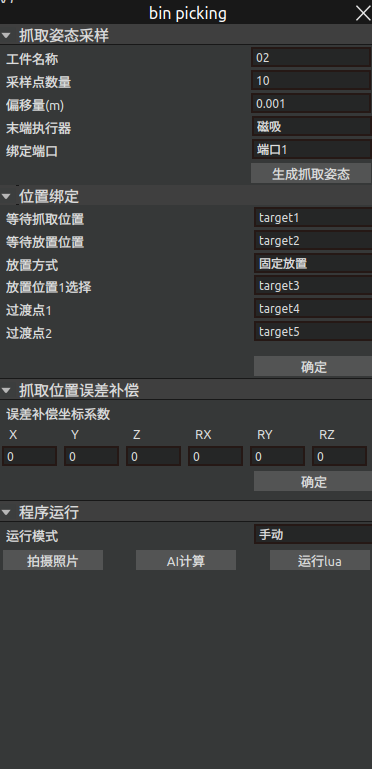
图5-2 bin picking弹窗
首先进行抓取姿态采样:
选择工件名称、采样点数量、偏移量等参数,点击生成抓取姿态对所选工件和当前工具的抓取姿态进行采样,采样成功后,终端会显示“生成抓取姿态成功”,即表示抓取姿态采样成功;否则终端显示“生成抓取姿态失败”并显示错误信息。
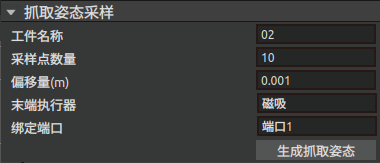
图5-3 抓取姿态采样
之后进行位置绑定
首先需要标定和绑定等待抓取位置和等待放置位置;选择放置方式,可选固定放置或规则放置;
固定放置:表示物体放置的位置为同一个位置;
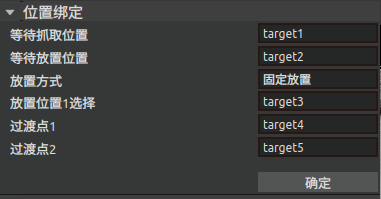
图5-4 固定放置
规则放置:用户可以根据需要设置行数、列数、层数和层高等放置规则;设置完之后点击确定绑定位置;终端显示位置绑定成功则成功绑定。
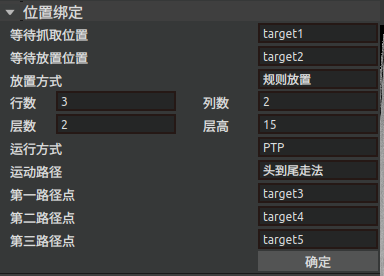
图5-5 规则放置
抓取位置误差补偿
暂未开放。
程序运行
生成抓取姿态成功和位置绑定成功后即可进行程序运行,有手动和自动两种运行模式。
手动运行:选择手动运行,机器人进行一次自动抓取;
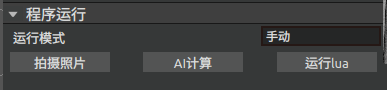
图5-6 手动运行模式
先点击拍摄照片,拍摄待抓取物体的照片;拍摄成功后,终端会显示“拍摄照片成功”提示,2D场景显示真实工件的RGB图。
之后点击AI计算,AI识别待抓取物体的位置,2D场景显示工件的bounding box;
等待计算完成之后点击运行lua,机器人进行一次识别抓取运动;
自动运行:选择自动运行,机器人则自动进行拍照,识别,抓取操作,直至待抓取物体全部被抓取;点击停止,则停止自动抓取运动。
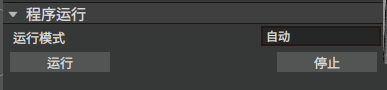
图5-7 自动运行模式
5.1.3. 整体操作过程
相机标定
bin picking循环码垛采用的是眼在手外拍照方式,在进行抓取操作之前需要先进行相机标定。
点位示教
如果选择放置方式为固定放置,则需要示教5个点位,分别为等待抓取位置、等待放置位置、放置位置、过度点1、过渡点2。
等待抓取位置:抓取点附近位置;
等待放置位置:放置位置附近点位(推荐放置位置正上方点位);
放置位置:需要将待抓取物体放置的位置。
过渡点:为防止抓取时碰撞,设置过渡点,从抓取点PTP到过渡点1再PTP到过渡点2。
选择放置方式为规则放置,则需要示教等待抓取位置、等待放置位置、第一路径点、第二路径点以及第三路径点。
等待抓取位置:抓取点附近位置;
等待放置位置:放置位置附近点位(推荐放置位置正上方点位);
等一路径点、第二路径点和第三路径点决定了规制放置的放置矩阵;第一路径点和第二路径点决定了放置矩阵的行,第二路径点和第三路径点决定了放置矩阵的列。
启动AI节点
在binpicking_for_block路径下打开终端,运行server_start.sh,在新打开的终端中显示Avoid_BP_Server is ready即表示AI节点成功启动。
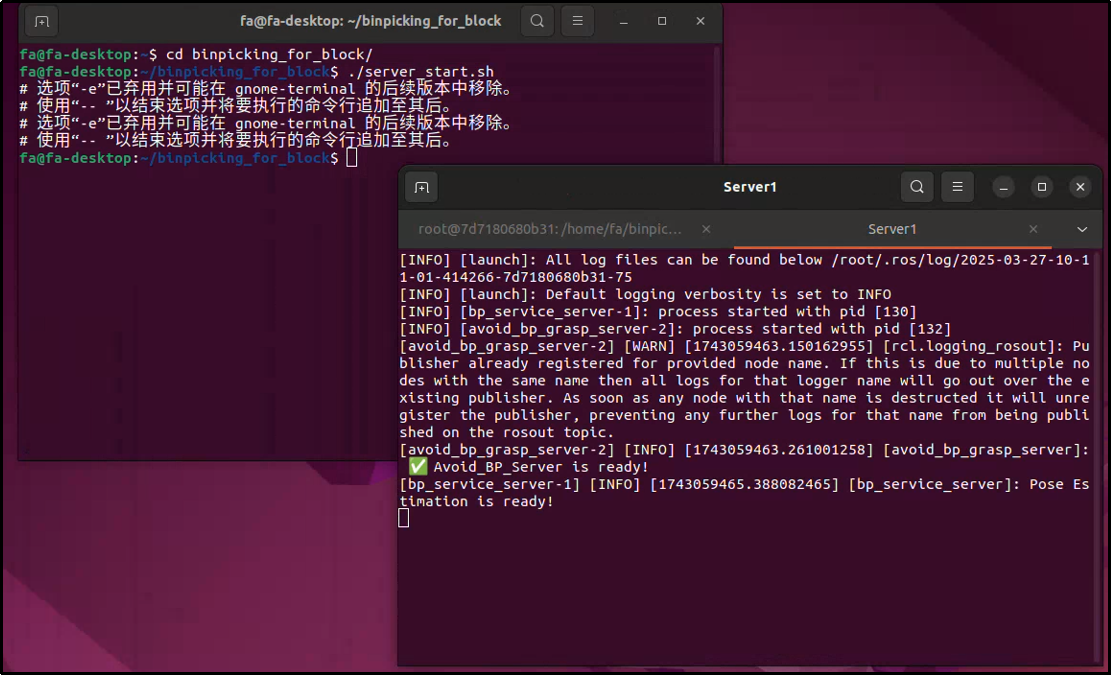
图5-8 启动AI节点
运行AIRLab软件
一键启动AIRLab软件(确保机械臂已连接,视觉节点成功启动),打开bin picking插件,先进行抓取姿态采样,采样成功后进行位置绑定,之后进行程序运行。
5.2. 喷涂
该插件模块是针对喷涂任务开发的功能模块。
5.2.1. UI界面介绍
点击菜单栏插件-喷涂,弹出喷涂弹窗。喷涂弹窗主要分为三个部分,喷涂参数设置、仿真设置和程序运行。
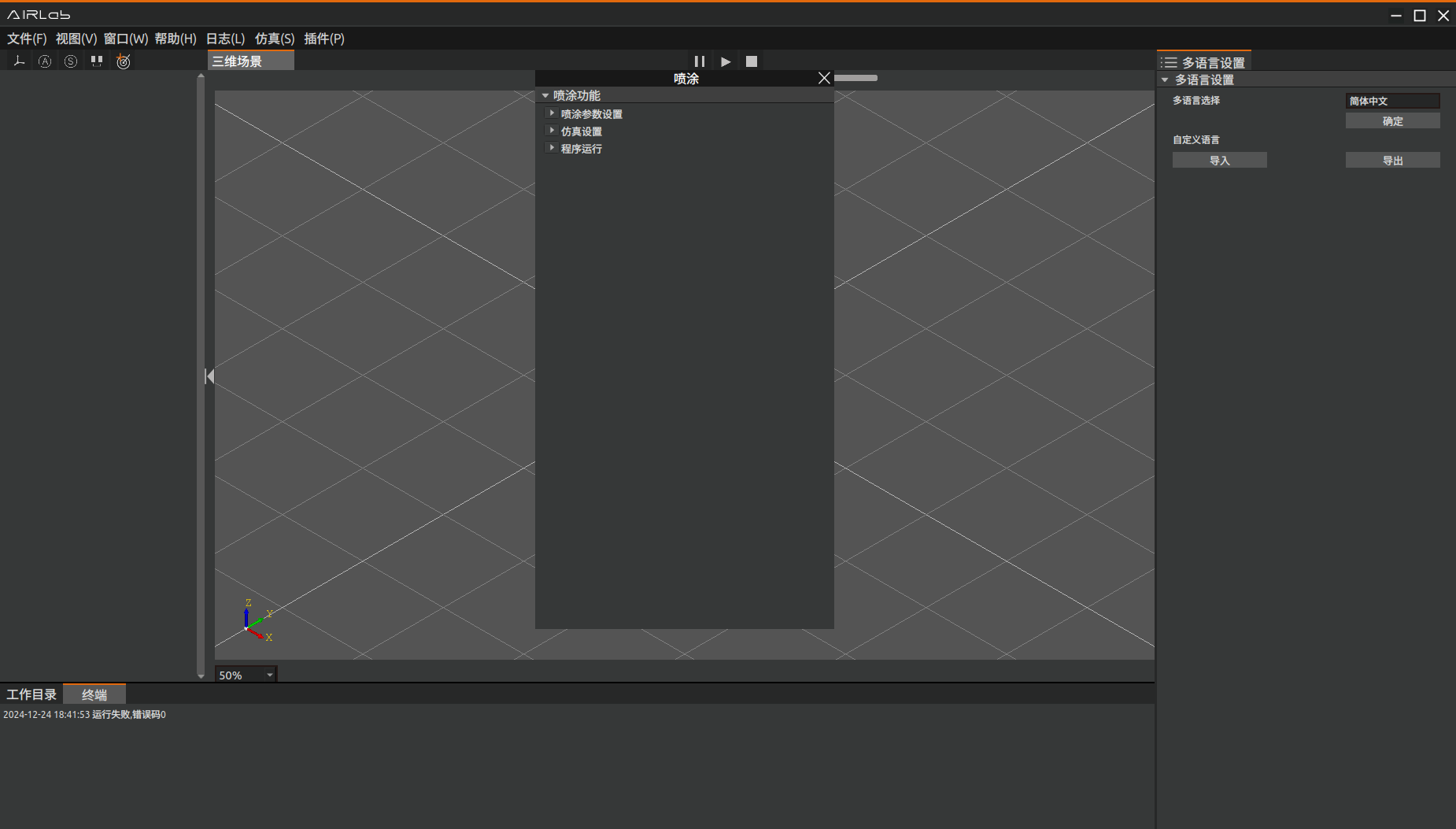
图5-9 喷涂插件弹窗
喷涂参数设置主要作用是选择喷涂模型和设置喷涂参数,包括喷涂方向、法向计算半径、椭圆长半轴、椭圆短半轴等。设置完成后,点击初始化AI,点击AI计算,会自动计算出喷涂轨迹。
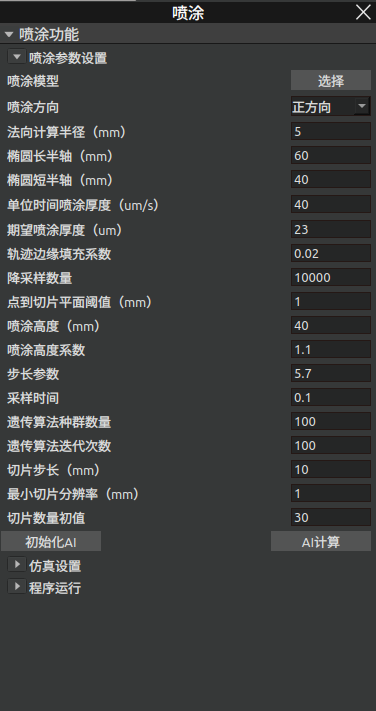
图5-10 喷涂参数设置
仿真设置主要是对喷涂轨迹进行仿真,先点击轨迹生成,三维场景中生成仿真轨迹。生成的仿真轨迹正确,设置仿真速度,点击运行按钮则可以看到仿真效果。点击停止按钮停止仿真。
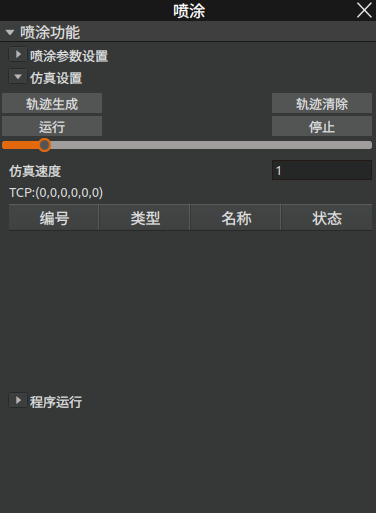
图5-11 仿真设置
程序运行部分主要是对喷涂程序进行轨迹保存、轨迹传输、轨迹加载等。
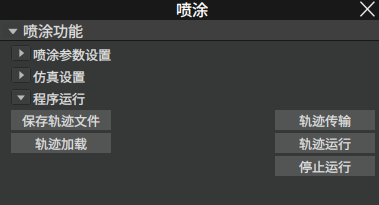
图5-12 程序运行
保存轨迹文件:点击“保存轨迹文件”按钮可以将喷涂轨迹保存到本地。
轨迹传输:将本地保存的轨迹传输到控制器。
轨迹加载:从控制器中加载之前喷涂轨迹。
轨迹运行:点击“轨迹运行”,运行当前轨迹。
停止运行:点击“停止运行”,停止当前运行的轨迹。
5.2.2. 仿真过程
喷涂完整仿真过程如下:
Step1:导入喷涂模型;在喷涂界面喷涂参数设置部分选择导入喷涂模型。
Step2:设置喷涂参数。
Step3:根据实际喷涂作业设置完喷涂参数后,点击初始化AI对AI节点进行初始化操作,之后点击AI计算计算喷涂轨迹。
Step4:喷涂界面仿真设置UI界面点击“轨迹生成”,观察喷涂轨迹生成无误后就可以运行仿真。
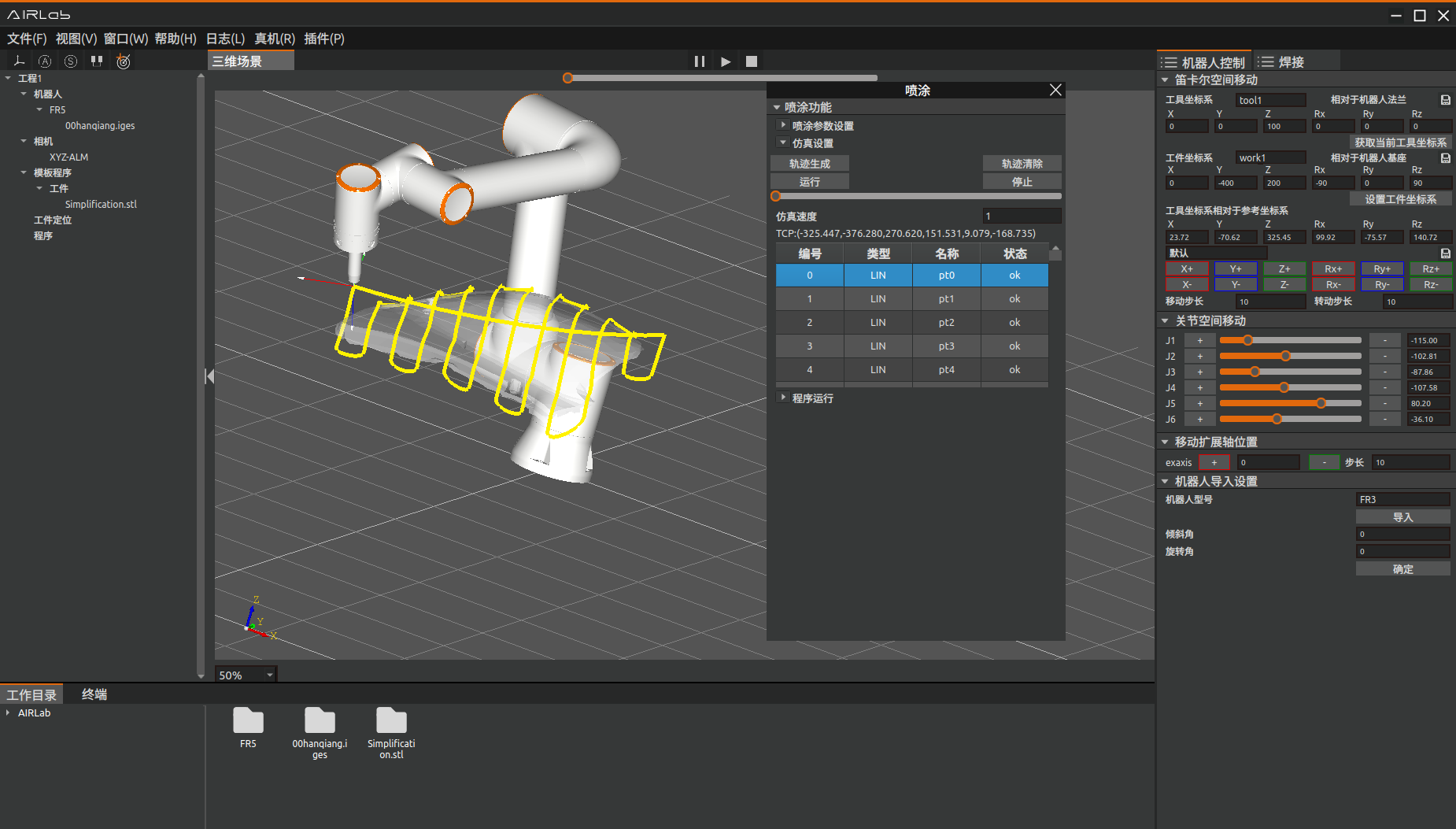
图5-13 喷涂仿真轨迹
对于已经计算过喷涂轨迹并将轨迹传输到控制器的工件,在下一次喷涂作业使不需要再次进行AI计算,直接进行轨迹加载再进行仿真即可。
5.3. 对话式AI助手
为提供更好的用户体验和提高用户效率,AIRLab软件开发对话式智能助手插件。通过对话式AI助手,用户可以与软件进行自然语言交互,下发需要的操作,机器人根据用户的输入进行相应的操作。点击菜单栏插件-对话式智能助手弹出智能助手弹窗。
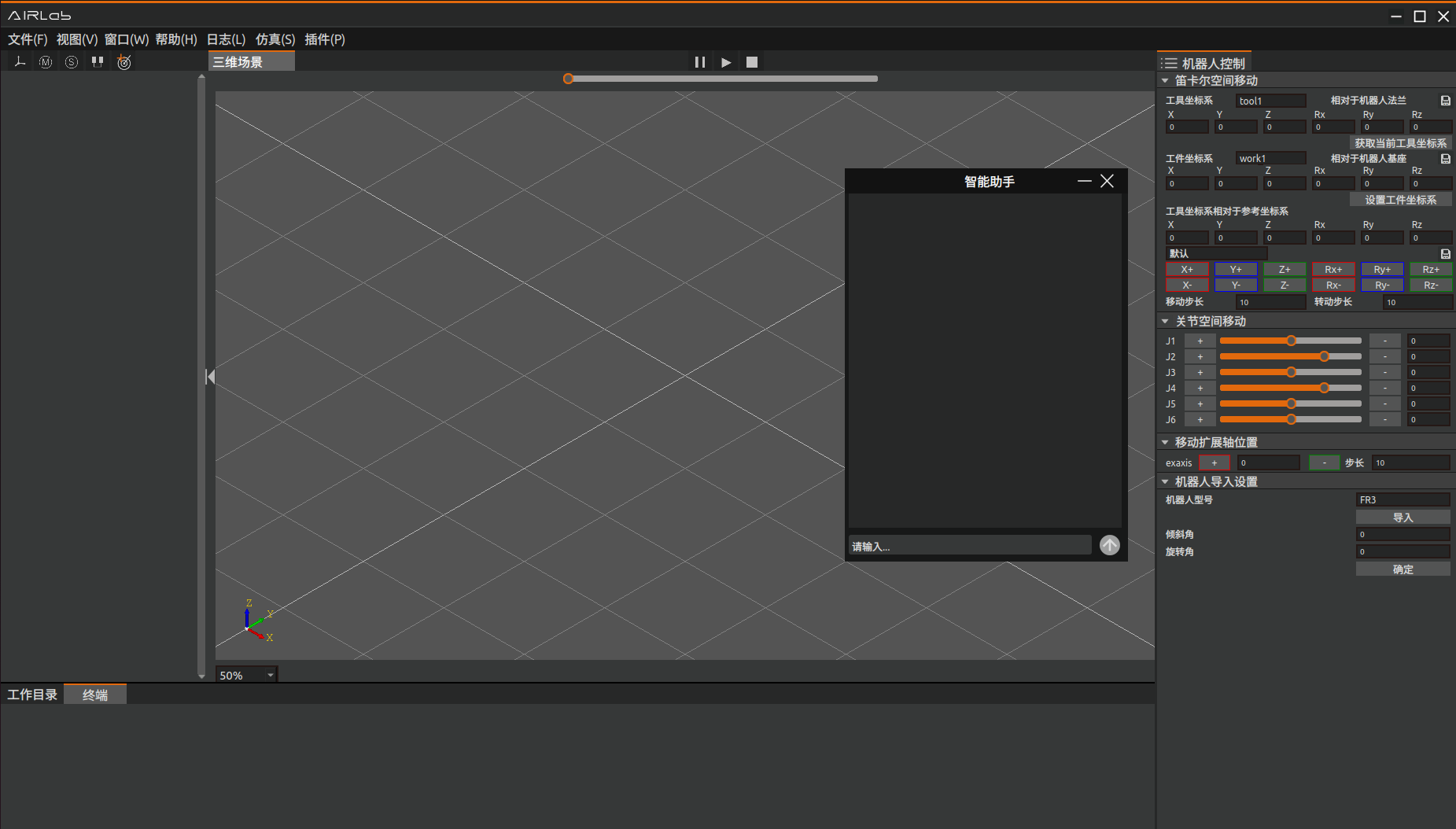
图5-14 对话式智能助手弹窗
在输入框输入问题或操作,点击发送,等待AI助手的回复或做出相应的操作。AI助手的主要功能有可以帮助用户导入/导出工程文件、绑定焊接工艺、新增工程树节点等。
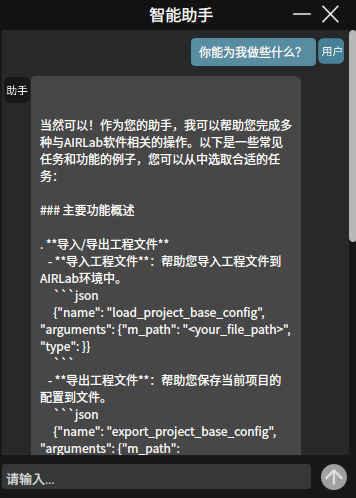
图5-15 AI助手功能
以导入一个工程为例:
用户发送“请帮我导入工程ZH-401-yyh.json”,AI助手回复确认信息,用户判断信息无误后回复“是”,AI助手执行相应的操作,导入ZH-401-yyh.json工程文件。
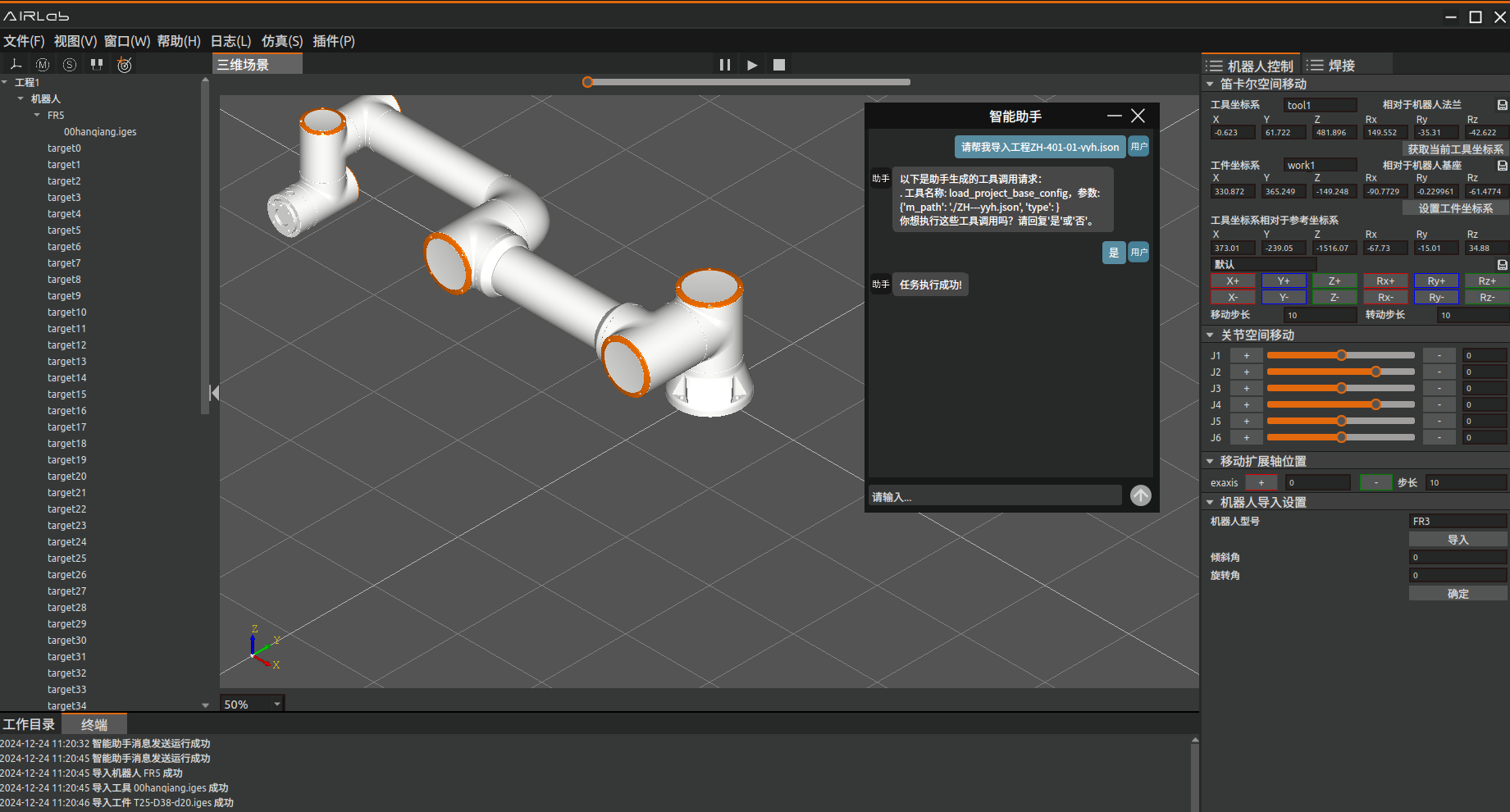
图5-16 导入工程